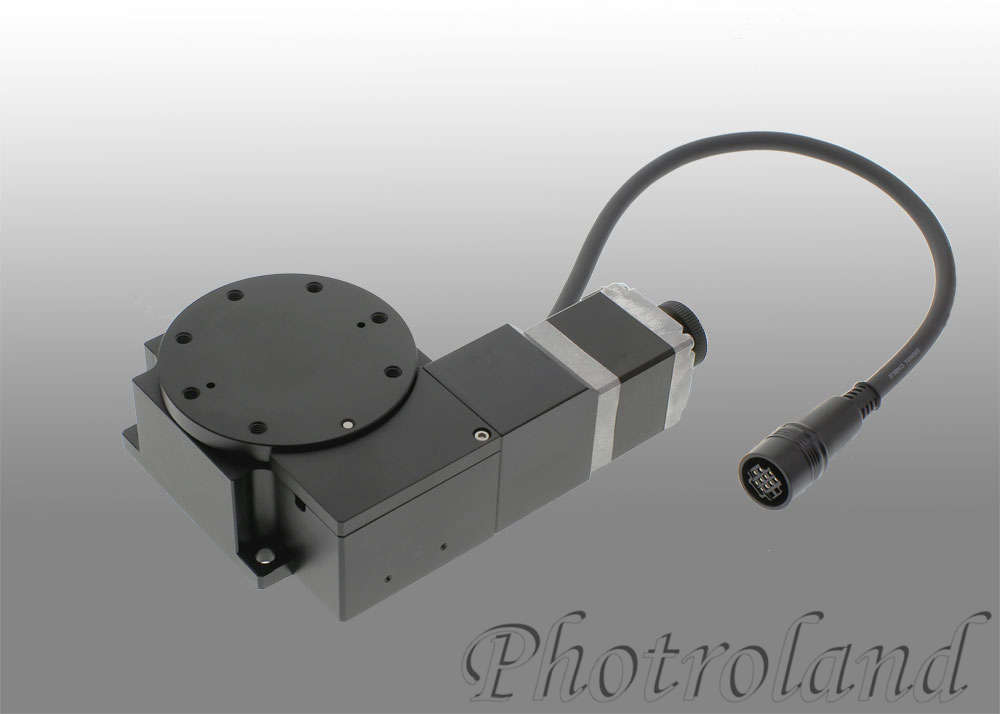
采用滚动轴承为导轨,使用蜗轮蜗杆为驱动机构的步进电机型转动平台。
RoHS 是
C E 是
●非常适用于测量·检查·评价装置定位用的自动平台。
| 电机 类型 | 5相步进电机 0.75A/相(ORIENTAL MOTOR(株)) |
| 电机 型号 | C9865-90215P(□28mm) |
| 电机 步距角 | 0.72° |
| 极限位置传感器 | 有(常闭) |
| 原点传感器 | 无 |
| 近接原点传感器 | 无 |
| 传感器 电源电压 | DC5~24V±10% |
| 传感器 消耗电流 | 15mA以下 |
| 传感器 输出端电气特性 | NPN集电极开路输出 DC30V以下50mA以下 |
| 传感器 信号的含义 | 遮光时 输出晶体管OFF(截止) |
| 导轨形式 | 十字交叉滚柱导轨(OSMS-80YAW滚动轴承) | ||
| 搭配驱动器 | MC-S0514ZU、SG-514MSC、MC-7514PCL | ||
| 搭配控制器 | GIP-101B、SHOT-702H、SHRC-203、HIT-PKG、HIT-M・HIT-S |
| 型号 | 台面尺寸(mm) | 转动范围 | 定位精度(°) | 重复定位精度(°) | 对比 | 单价 | 发货日期 | 购物车 | |||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 OSMS-80YAW
OSMS-80YAW |
φ80 | 逆时针旋转CCW方向无限制 顺时针旋转方向在0度附近处停止 | 0.15 | 0.02 |
|
会员可见 | 咨询 | ||||||||||||||||||||||||||||||||||||||
|
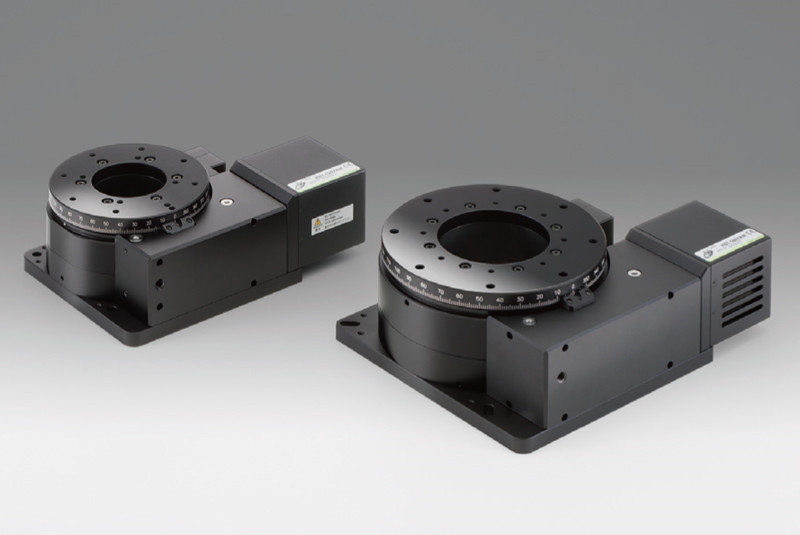
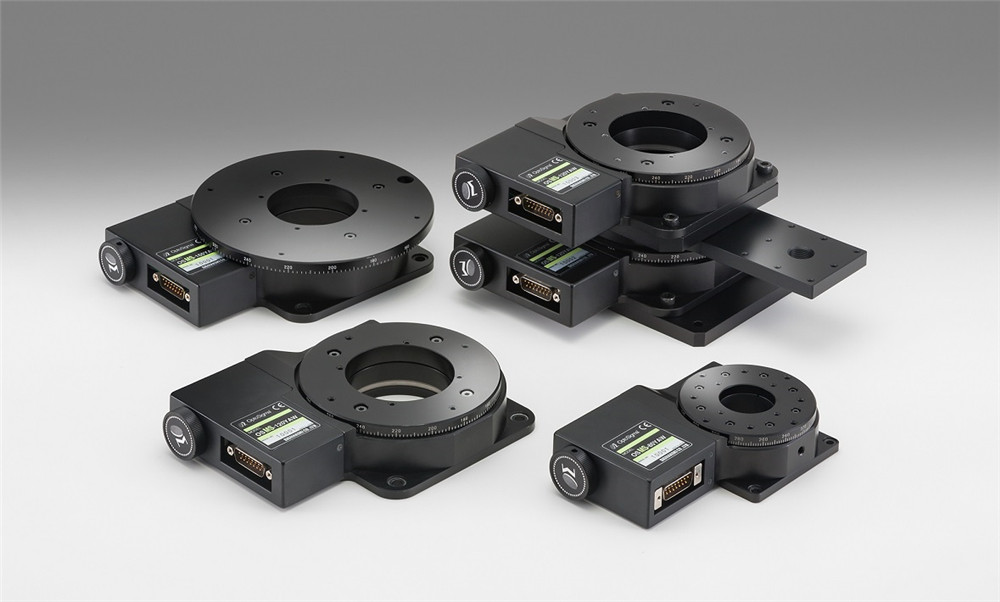
自动转动平台-5相步进电机平台尺寸φ80/φ120/φ160mm /OSMS-80YAW
|
|||||||||||||||||||||||||||||||||||||||||||||
|
OSMS-120YAW |
φ120 | 逆时针旋转CCW方向无限制 顺时针旋转方向在0度附近处停止 | 0.1 | 0.02 |
|
会员可见 | 咨询 | ||||||||||||||||||||||||||||||||||||||
|
自动转动平台-5相步进电机平台尺寸φ80/φ120/φ160mm /OSMS-120YAW
|
|||||||||||||||||||||||||||||||||||||||||||||
|
OSMS-160YAW |
φ160 | 逆时针旋转CCW方向无限制 顺时针旋转方向在0度附近处停止 | 0.1 | 0.02 |
|
会员可见 | 咨询 | ||||||||||||||||||||||||||||||||||||||
|
自动转动平台-5相步进电机平台尺寸φ80/φ120/φ160mm /OSMS-160YAW
|
|||||||||||||||||||||||||||||||||||||||||||||
|
OSMS-120YAW-W |
φ120 | 逆时针旋转CCW方向无限制 顺时针旋转方向在0度附近处停止 | - | 0.02 |
|
会员可见 | 咨询 | ||||||||||||||||||||||||||||||||||||||
|
自动转动平台-5相步进电机平台尺寸φ80/φ120/φ160mm /OSMS-120YAW-W
|
|||||||||||||||||||||||||||||||||||||||||||||